Today I tested the newest improvements in the Real-Time Flood Mapper tool inside STE by simulating the devastating 2019 Golestan flood in Aq Qala, Iran.
This flood was extremely challenging to model, even for advanced hydrodynamic solvers (SWE), due to:
◾ Very mild to even negative slopes near the Caspian Sea
◾ Lack of accurate DEMs
◾ Complex flood management conditions
Yet, the people of Aq Qala endured over 3 meters of water for a month during this disaster.
🚀 What amazed me today is that STE’s Real-Time Flood Mapper could reproduce the flood depth and extent of this event in milliseconds, with accuracy validated against both SWE simulations and Sentinel-1/2 flood detection data.
📊 For comparison:
◾ SWE (Shallow Water Equations) simulation: >20 minutes, even on an Intel i7-14700K
◾ STE Real-Time Flood Mapper: milliseconds
👉 And this was achieved without any site-specific calibration.
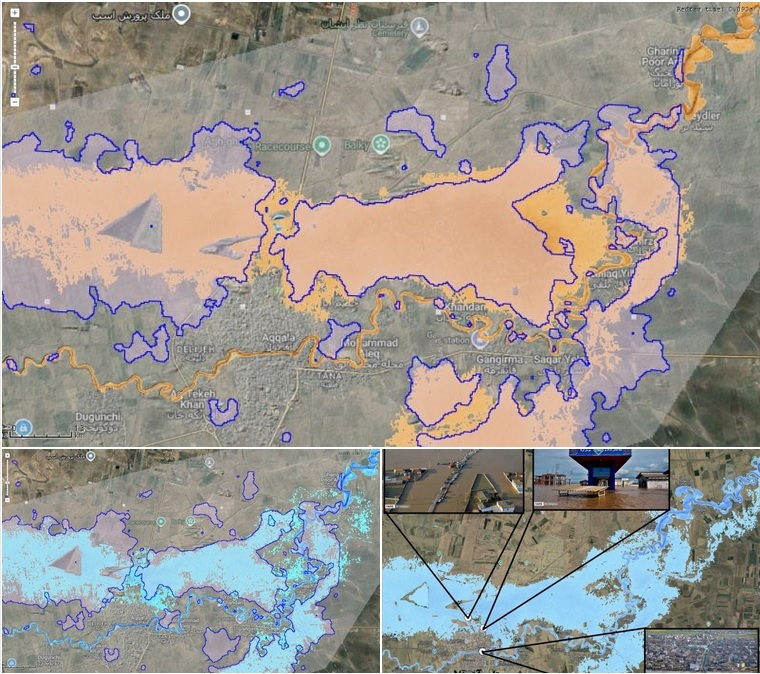
I’m sharing 3 visuals in this post:
1️⃣ Flood depth (brown) by STE Real-Time Flood Mapper vs. satellite flood extent
2️⃣ SWE flood depth (blue) vs. satellite flood extent
3️⃣ Field photos with flood depths overlaid by the Real-Time Flood Monitoring System (RTFMS) – a distinct cloud-based platform I’ve developed for live flood simulations. Read more : https://rtfms.hwstr.ir/
🌐 Good news:
◾ A cross-platform workflow is coming between STE and RTFMS → create configs in STE, upload to RTFMS, and get the real-time flood maps in real-time with the time frequency emergency managers require.
◾ A new volumetric-based rain-on-grid real-time algorithm is on the way!
My vision is clear: make real-time flood simulation more accurate, practical, and accessible – with the ultimate aim of protecting people and saving lives.
What I need now is time and support to push this forward.